




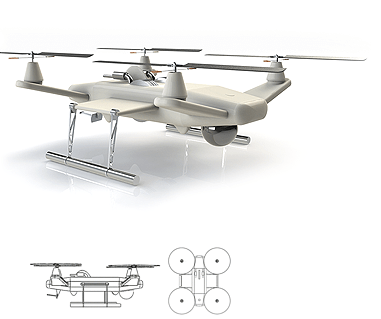
Очень много вопросов приходит в Ваших сообщениях, Почти все они сводятся к одному. 99% людей путают этот аппарат с мультикоптером.
Это и неудивительно, так как 4 винта сразу наводит на эту мысль. Сразу отвечу – это не мультикоптер, это вертолет, или даже несколько больше чем вертолет
В чем разница?
Очень много вопросов приходит в Ваших сообщениях, Почти все они сводятся к одному. 99% людей путают этот аппарат с мультикоптером.
Это и неудивительно, так как 4 винта сразу наводит на эту мысль. Сразу отвечу – это не мультикоптер, это вертолет, или даже несколько больше чем вертолет
В чем разница?
1. Мультикоптер приводится в действие винтами с фиксироваными лопастями. обычно небольшего диаметра и высокими оборотами.
Мультикоптер управляется за счет изменения скорости вращения винтов.
Самолетного типа винты отбрасывая воздух вниз создают тягу вверх. Но они не совсем оптимальны для таких запредельных потоков воздуха и чем больше нагрузка и масса аппарата тем меньше КПД такого привода. Согласитесь ведь самолет летит за счет крыльев а не пропеллера.
2. Мультикопрер как правило имеет от 3 до 8 пропеллеров и такоеже количество моторов. ( каждому мотору дополнительно нужен контроллер ) это позволяет “Рулить” каждым двигателем и тягой винта.
3. В данном аппарате использован принцип управления винтом от вертолета. т.е. ротор вращается с фиксированной скоростью ( около 2000 об.мин) а лопасти могут менять углы наклона прямо во время вращения. Например если углы лопастей – 0° , то винт не создает никакой тяги и просто вращается. Но как только мы увеличиваем угол появляется тяга которая и поднимает аппарат в небо. больше угол = больше тяга. вплоть до 30°. (Особо отмечу что тяга может быть и отрицательной т.е. угол лопастей от 0° до -30° . что позволяет моделям вертолетов летать верхногами. Все четыре ротора имеют подобное управление. Известно также что существует несколько больших вертолетов с таким управлением. Это позволяет летать по принципу мультикоптера при одинаковой частоте оборотов роторов и привод сводится к одному мощному двигателю.
4. Мы пошли еще дальше: Каждому ротору мы установим Автомат перекоса. Это позволит каждому ротору не только менять уровень тяги. но и изменять направление тяги во все стороны.
таким образом наклоняю тягу всех роторов вперед – мы получаем движение вперед без наклона корпуса ( наклоняются сами винты ). аналогично для всех сторон.
5. Как поворачивать ? Очень просто. наклонить тягу передних винтов и задних в разные стороны.
6. Усложнение конструкции. Да сложнее. но это управление в количестве одна штука присутствует на всех моделях вертолетов (не дешевых игрушках, а дорогих 3D ) и отлажено до мелочей. просто берем 4 проверенных устройства.
7. Для чего: стабильность корпуса относительно винтов. – корпус работает как стабильная платформа для камеры с огромным обьективом и увеличением (любые колебания с наблюдением в 4 – 5км недопустимы)
8. Сложность управления винтами равноценно упрощает подвес камеры, и позволит делать недоступные досих пор для БПЛА задачи.
9. Вес и размер. Огромный. мощный. Не предназначен для полетов там где стреляют. его задача висеть подальше и повыше и мощной оптикой смотреть издалека.
10. Запас мощности позволит например нести радар выявлять вражеские БПЛА и …. например сбрасывать на них сетку.
11. Мощность мотора позволяет создать тягу до 87Кг. естественно лопасти должны уметь преобразовать эту огромную энергию. потому лопасти такие огромные ф ротора от 1 до 1.2 метра
Это позволит кроме собственных 20-30 кг. взять на борт еще до 20кг полезного груза.
На этом пока все.
Спасибо. за поддержку. дальше приступаем к работе и будем делать последующие публикации.
































{kind=link}
{kind=link}